
中国青年报客户端讯(潘聪聪 中青报·中青网记者王烨捷)有没有一种全天候的“超人”,可以代替核电站工作人员完成这些日常巡盘巡检工作?日前,华东理工大学机械与动力工程学院的6位硕博研究生与教授易建军一起,研发了“面向核电站巡检的具身智能机器人”。该项目在刚刚落下帷幕的第24赛季Robotex世界机器人大赛亚洲总决赛上,斩获了亚洲创新创业挑战赛创新赛道总决赛亚军。

在核电站的运维管理中,传统的人工巡检不仅耗时耗力,还面临着高辐射风险,传统的巡检机器人又大多功能单一,存在地形适应性弱、复用性差等问题。
痛点就是机会。“具身智能虽然不是人类,但它可以在与环境的交互中学习技能,像人类一样感知、理解、决策,模仿人丝滑地完成各种动作。”华理机械与动力工程学院教授易建军介绍,团队突破传统巡检机器人的设计思路,从轮式具身、融入大模型两个方面进行创新。最终设计出来的机器人运动灵活,可实现自主避障、跟踪追踪等功能,还有一双善于“找茬”的“眼睛”和一个博闻强识的“大脑”,能读取温箱设备。

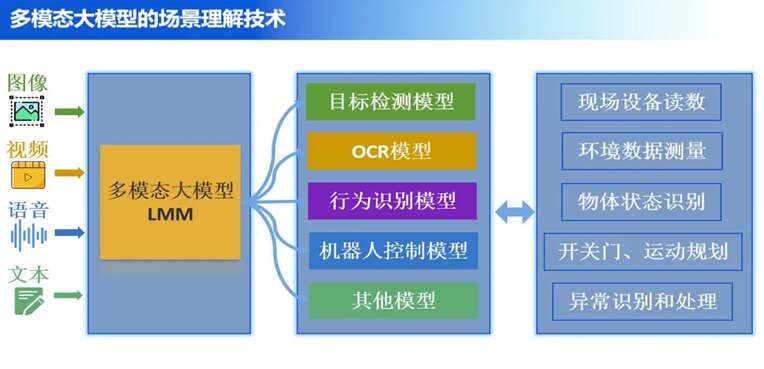
“我们提出了多模态大模型技术,通过融合图像、语音、文本等多模态信息,提升机器人的场景理解和任务规划能力。”团队成员叶杭博说,人的大脑就像是一个超级计算机,可以通过看、听、摸来学习新事物,多模态大模型也是这样。比如,想让多模态大模型了解核电站是怎么工作的,就可以给它看核电站的照片,听核电站的声音,读关于核电站的文章等,“这样,它就能渐渐学会核电站的知识,像一个小孩子慢慢长大”。
有了会思考的“智慧大脑”,如何让机器人“行动自如”?该团队通过构建4D语义地图,同时基于深度强化学习的运动控制技术,让机器人不但知道自己要“去哪”,更知道“该怎么去”。

4D语义地图堪称“保姆级”地图。如同教小孩学走路一样,团队成员通过基于深度强化学习的运动控制技术,让机器人不断尝试不同的动作。此外,团队还通过基于数字孪生的信息化监督调度和抗辐射加固技术,构建了核电站的数字化模型,实现对设备状态的实时监控和故障预测。
据介绍,项目组目前已申请并获授权发明专利8项,发表高水平学术论文5篇,并取得多项软件著作权。




