
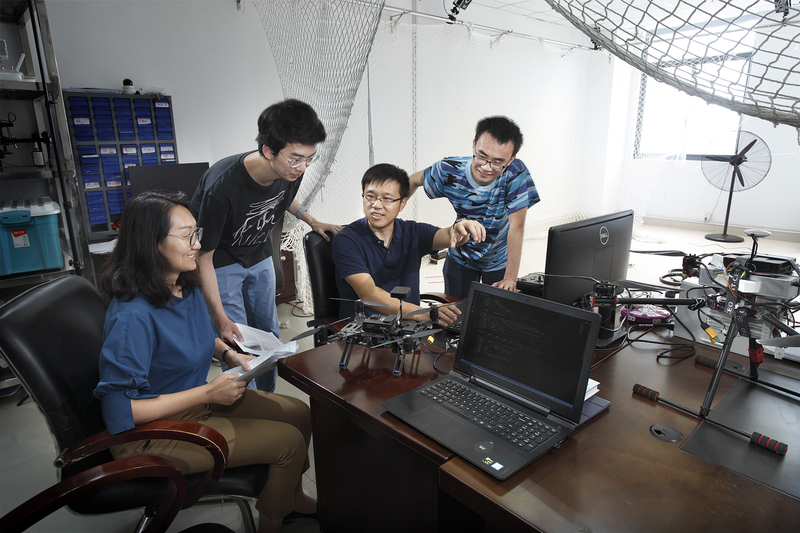
5月19日召开的上海市科技奖励大会上,华东理工大学信息科学与工程学院唐漾教授领衔的“网络化耦合动态系统协同分析与控制”项目获得上海市自然科学奖一等奖,主要完成人同时有华理的和望利教授和钱锋院士。该项目以系统的异质性和网络化建模为基础,围绕网络化耦合动态系统的协同分析与控制两个基本科学问题展开研究,为网络系统的高效协同提供了理论基础。
什么是网络化耦合动态系统?实现网络系统的高效协同又具有怎样的科学意义和实际应用价值?
实际上,网络化耦合动态系统无处不在。对网络化耦合动态系统协同分析与控制的研究,作为人工智能领域的典型也受到越来越多学者关注。
自然界中,成千上万只萤火虫同步闪烁、鸟群集体迁徙、鱼群聚集在一起自组织地游动,这些自然界壮观景象的背后,是有“领导者”在“指挥”吗?“这种生物群体就是一种实际的耦合动态系统。一只萤火虫、一只飞鸟、一条游鱼,这些一个个的智能个体,能够感知到自己所处的环境,并通过自身所具备的能力,对周围邻居的状态作出相应的反应。成千上万只萤火虫同步闪烁,就是信息交互后群体智能的呈现。”据唐漾介绍,受到这些生物群体集群协同的启发,网络化耦合动态系统的协同控制已被广泛应用于无人机集群控制、无人驾驶、自动码头、自动化仓储等工程领域。

“网络化耦合动态系统具有资源共享、协调性好、分布性高、自主性强等特点,且个体能够通过协调合作来解决大规模的复杂性问题,实现1+1>2。”唐漾以钱锋院士经常提起的流程工业智能优化制造举例说,从原料输入到产品输出的整个过程,每个操作单元都可以看作一个智能体,局部单元的最优并不代表全局最优,如何协调各个单元,通过各单元与邻居单元的协作,实现分布式交互协同,达到全局最优就是在流程制造中的主要目标。此外,对于集群无人机而言,分布式调控可以避免集中式控制的缺点,从而降低集中控制带来的风险。
但由于网络化耦合动态系统往往规模巨大、结构复杂,且存在节点动力学异质和多种通信限制,要进行协同分析,实现分布式调控存在着本质困难。如何对网络节点动力学和耦合方式进行有效表征,实现网络化耦合动态系统的建模、协同分析与控制,已成为当前信息科学重点前沿交叉领域所迫切需要解决的共性基础问题。
摆在项目成员面前的是三大难题:网络规模巨大,异质建模困难;通信限制时变,约束分析困难;控制目标多样,节点选择困难。
但要把实际问题转化为科学研究,首先就离不开系统建模。
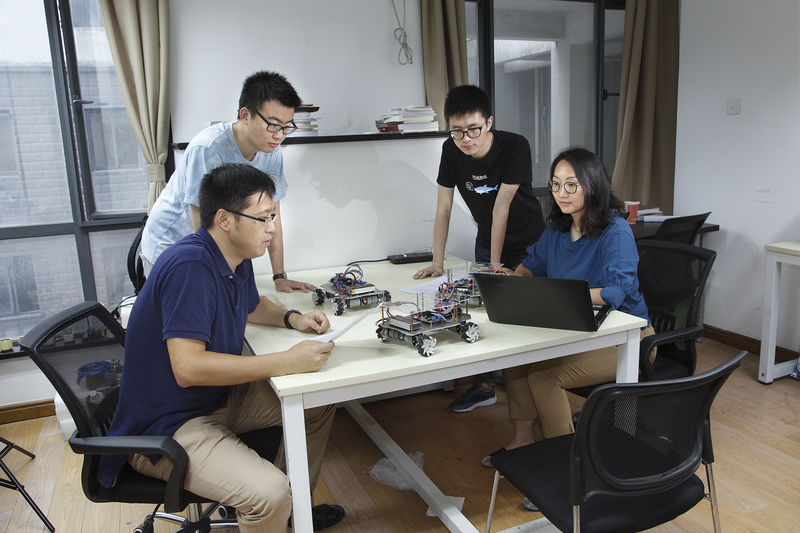
社交网络中,个体间存在着性格差异;机器人编队中,各个移动机器人的零部件存在异质性,导致质心不均以及加速能力不同……大规模网络化动态耦合动态系统在刻画节点动力学时,都需要考虑广泛存在的参数不确定性以及个体差异,因为这些因素往往导致耦合动态系统存在节点异质性,从而对建模和分析带来严峻挑战。
与以往集中于所有节点具有相同动力学的研究不同,由于实际耦合系统个体大多存在差异,项目团队另辟蹊径,从个体动力学角度出发,创新性地研究了异质耦合动态系统在同步误差大的拟同步问题,提出了异质脉冲的新概念,建立了新的拟同步误差估计方法。
解决了建模难题,通信约束是另一道坎。
大规模网络耦合动力系统,由于耦合系统之间需要通过通信网络传输各自状态信息,受传输距离、带宽、速率等通信限制,传输时延、丢包、采样等网络因素会对网络化耦合系统的协调性能产生严重的影响甚至破坏协同行为。
这就需要设计高效的分布式协同控制协议,尽可能减少节点之间的通信,避免网络化因素对于协同性能带来的负面影响,从而提升网络资源的使用效率。
与其被动受制,不如主动适应。“我们从网络协同调控出发,将个体动力学放大到整个网络,揭示了多种通信约束影响协同性能的机制,提出自适应协同分析方法。”唐漾说。
网络化耦合动态系统节点选择控制同样是个难点。控制复杂网络系统的关键,在于寻找使得整个网络系统可控的所需最少驱动节点的个数,以及这些驱动节点所在的位置。大规模耦合动态系统节点多,考虑控制成本和维护成本的因素,往往不会在全部或大部分节点上施加控制器,而是通过部分节点上施加控制,达到低安装和低维护成本的理想控制目标。

控制目标多样,必然导致选择困难。“‘擒贼先擒王’,我们把目标定在了网络化耦合动态系统领航者的选择问题上。”唐漾说,团队从网络性能优化的角度出发,利用耦合动态系统的实时状态信息,提出了新颖的节点选择方法——基于脉冲控制的调度策略,设计相应的混杂控制方法,解决了网络化耦合动态系统控制问题中的领航者选择问题。
“网络化耦合动态系统协同分析与控制将有利于制造过程的数字化、自动化、网络化和智能化研究,为移动机器人编队控制、流程制造协同控制等应用提供扎实的理论基础。”唐漾说。
在《新一代人工智能发展规划》中,“群体智能”和“自主协同与决策”等基础理论研究被列为重点发展方向,“网络化耦合动态系统协同分析与控制”项目正是面向这一重大战略需求而开展的研究。
目前,唐漾、和望利、邱剑彬、钱锋、张文兵等项目成员已在Automatica、IEEE汇刊等权威期刊上发表8篇代表性论文,其中,7篇论文入选ESI高被引论文(Top1%),1篇论文入选ESI热点论文(Top0.1%)。在Web of Science核心数据库中总计被引1098次,他引906次,单篇最高他引193次。此外,8篇代表作还得到了国际上50位各国院士和IEEE Fellow的正面引用和评价。




